

About
So i have this so called Racer 250 size quadcopter in hand after got me a good second hand price from my buddy which packaged from Hobbyking.com  combo set DIY assembly kit last year. I took a bite because all those fads and trendy stuff about mini quad racer spawn all over the internet, so curiosity get the best of me. What i got here is a FPV DIATONE 250 mini quadcopter platform with hardware mostly from Hobby King's line of Multistar motors and esc combos, from KK2 board for my first tryout to MultiWii Pro flight controller on second build and some FPV sets installed. Took me a month to figure out the right PID's and with the help of my buddy (Mr. Voon) to get it fly right especially when transitioned to MultiWii Pro. Did i have some fun...hmmmm...yes i did but short lived because flying solo high speed racing around on 250 alone is boring. Further more my locals are late bloomer on 250 so i have to move on to another project. Others crash a lot because having hard time to get the PID setting right.
combo set DIY assembly kit last year. I took a bite because all those fads and trendy stuff about mini quad racer spawn all over the internet, so curiosity get the best of me. What i got here is a FPV DIATONE 250 mini quadcopter platform with hardware mostly from Hobby King's line of Multistar motors and esc combos, from KK2 board for my first tryout to MultiWii Pro flight controller on second build and some FPV sets installed. Took me a month to figure out the right PID's and with the help of my buddy (Mr. Voon) to get it fly right especially when transitioned to MultiWii Pro. Did i have some fun...hmmmm...yes i did but short lived because flying solo high speed racing around on 250 alone is boring. Further more my locals are late bloomer on 250 so i have to move on to another project. Others crash a lot because having hard time to get the PID setting right.
After playing around few months i decided to put my review and stuff that might interest you in this build. If you're into thrill of speed like Star Wars pod racer like you seen in the movie zooming around obstacles, tailgating your buddy drones, slalom around trees and stuff this is for you.....and yes don't forget to buy spare props you might need it. You need some crazy flying skills, good eyes and reflexes to steer the quad around the circuit. This thing flips! The cost of building a 250 size quad is cheaper provided you already have your existing FPV gears and radio transmitter on pilot side: 4x motors, bunch of propellers, 4x ESC, cheap mini flight controller boards such as CC3D, KK2, NAZE, MultiWii or equivalent, radio receiver, video transmitter, a camera and a 250mm size quad frame....all in miniature size..and basically they are cheap because they are small. Only your skills will prolong its survivability both during flight and build.
So here the things you might expect from an FPV 250 size quadcopter.
-
 AGILITY
AGILITY
They are extremely agile and aerobatic, so you might have to get your hands full on the stick 60% more than you used to on toy quadcopter or bigger size 340-450 and above. Twitchy unless you're good at tuning PID on your flight controller. For beginners it will be a wild bucky ride. -
SPEED
Like i said before you're into this because its racer size multirotor. Smaller stuff usually have higher rpm (KV) miniature motor and props that spin faster and fast reaction thrust. -
HIGHER MAINTENANCE
If you're deep into this and have weekly to daily racing with your buddies or more frequent zip zap around the park you might need to spent more on spare propellers and frame rotor arm replacement, during unlucky days it might go down on you. I spent more time replacing the propellers as i flew lower and narrower around the obstacles. Crashes is unavoidable because you're asking for it. Sometimes it flipped by its own due to wrong/sensitive "P" value on PID's -
SHORT RANGE
Not because it have some lousy video transmitter or radio receiver, they can have long range equipment with GPS but at this size i don't see the point of going long range beyond 1~5km in this frame size. Short stubby rotor arm isn't helping much to counter heavy wind at long range high altitude..very twitch to have some long range adventure can be tiring on your thumbs too, smaller li-po battery just good enough for short distance and small 250 frame isn't good enough to spot around if you crash. Few portion of people of people does it but will spent more bucks and time to achieve perfection. Go get bigger size if you wanted to go further.
I have to let you guys know that tuning Flight Controller PID is major factor before getting it to fly right. Building and assembly is a walk in the park. Getting the right ESC set to match the motor KV also vital. Most quadcopter of this size must use ESC with "SimonK" firmware installed to ensure fast reponse and high kHz timming between the flight controller and the motors responses. Else ESC with "BLHeli" firmware installed also a great choice too.

Model specification & setup
 Airframe type: Quadcopter 250mm
Airframe type: Quadcopter 250mm
Branding/Manufacturer: DIATONE
Model name variant: DIATONE FPV250
Material build: Nylon plastic
Rotor to rotor width: 250mm x 250mm
Flying weight: 380~gram
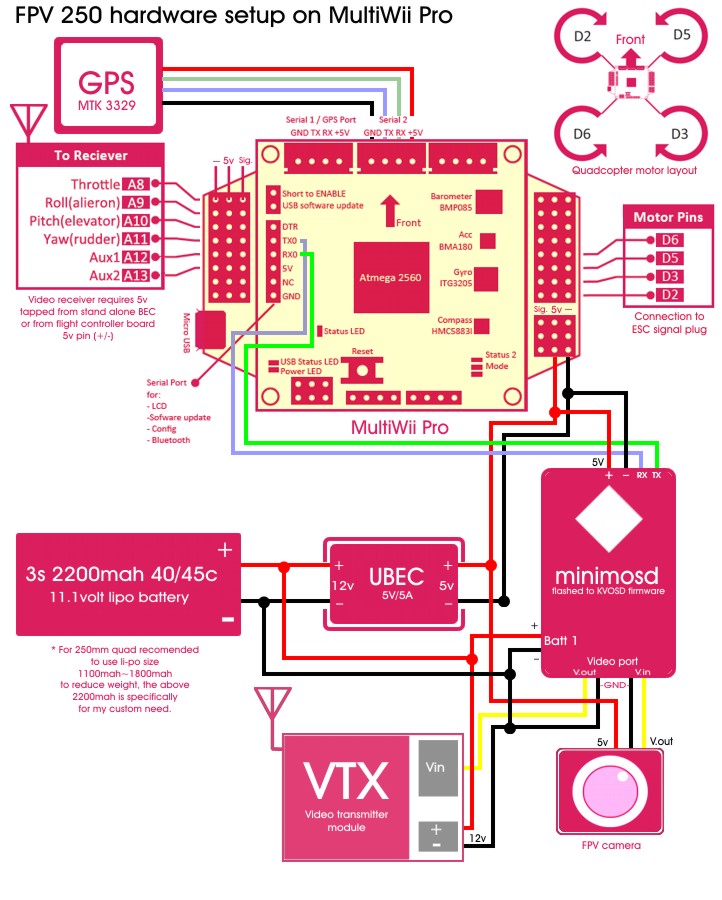
Flight control board: KK2.0 (First build) ~ MultiWii Pro + GPS (Second Build).
ESC: HK Multistar 10A with 5V/1A internal BEC (sucks!...buts its cheap please avoid this crappo esc...have no choice to use it for being cheapo.)
Motors: 1704 1900KV brushless
Proppellers: Gemfan/Turnigy 3 blade 5x3
Radio receiver: FrSky 2.4ghz telemetry type with diversified antenna.
Main battery: 2200~2700mah 3s 35c~45c
My DIY FPV specification.
 Below are list of hardware needed for my FPV specification:
Below are list of hardware needed for my FPV specification:
- Camera (First build): SONY 520TVL CCD camera ~12v + 130 degree FOV lens
Camera (Second build): 808 #16 V3 720HD with video output. (This V3 camera uses MOBIUS camera tools) - OSD (First Build): HK G-OSDII flashed with UOSD firmware.
OSD (Second Build): MinimOSD flashed with KVOSD firmware to match MultiWii protocol. - External BEC: HK mini 5A/5V UBEC to power flight controller board, camera and radio receiver.
- Video transmitter: 5.8ghz 200mw SKYZONE 32ch mini video transmitter 7~12v
- Video antenna: DIY tuned CL antenna
- Battery: Shared with main.
Building
Working on small stuff on 250 frame is not that difficult but actually time consuming on tunning to get it fly the way you wanted. You'll need some basic soldering skills and do some research about setting up PID on your respective flight controller. You can't just simply "plug n fly" it like bigger multirotor  frame. I have to trim the wires, remove unnecessary weight, keep electric/magnetic sensitive hardware away from each other, get overall weight distribution equal on each side, select the right combo of esc, motor and battery to get the right thrust, more work on flight controller PID's and lastly expect some crashes on your first maiden due to miscalculated PID.....that's why you need to buy more spare propellers. I remember each rotor arm i have to replace 5x set of props until i get the PID right. I manage to get my flying weight around 380gram running on 3s 2200mah 35c at final built. The first build runs on KK2.0 FC board + GOSDII (UOSD firmware) , lastly on my final built was running on MultiWii Pro FC board + minimOSD (KVOSD firmware) which give me extra RTH and altitude hold in the open field. Make sure to get any ESC with "SimonK" or "BLHeli" firmware to get the flight response right on the motors. I'll provide the links to community page how you can tune this FC (Flight Controller board) down below the page and also shopping list to get the right stuff.
frame. I have to trim the wires, remove unnecessary weight, keep electric/magnetic sensitive hardware away from each other, get overall weight distribution equal on each side, select the right combo of esc, motor and battery to get the right thrust, more work on flight controller PID's and lastly expect some crashes on your first maiden due to miscalculated PID.....that's why you need to buy more spare propellers. I remember each rotor arm i have to replace 5x set of props until i get the PID right. I manage to get my flying weight around 380gram running on 3s 2200mah 35c at final built. The first build runs on KK2.0 FC board + GOSDII (UOSD firmware) , lastly on my final built was running on MultiWii Pro FC board + minimOSD (KVOSD firmware) which give me extra RTH and altitude hold in the open field. Make sure to get any ESC with "SimonK" or "BLHeli" firmware to get the flight response right on the motors. I'll provide the links to community page how you can tune this FC (Flight Controller board) down below the page and also shopping list to get the right stuff.
FPV building level difficulty/rating: Medium (7/10)
FPV equipment setup grade: Basic (KK2)/Advance (MultiWii Pro + GPS)
Building hours required: 12 hours.
Skill required: Soldering
Critical issues during installation: Flight controller PID tuning.
Required additional mods/must do improvement: Wire and weight trimming
My advice on your first purchase and build on this is don't go for carbon fiber material parts and expensive stuff yet. You'll be super sorry on your first crash. Carbon fiber cracks and breaks on first crash especially during your first calibration and tuning flight. Carbon fiber are overrated material. Nylon & plastic bent and deform but still held the parts well and give you another second or third chance to fly before you need to replace the parts.


FPV flight characteristic and performance
Its fast, its twitchy and so metimes i have to put fight on my YAW. Lots of PID tuning along the way and bunch of spare propellers ready in a box to tag along. Lots of time spending tuning PID...almost giving up flying 250.
metimes i have to put fight on my YAW. Lots of PID tuning along the way and bunch of spare propellers ready in a box to tag along. Lots of time spending tuning PID...almost giving up flying 250.
Minimum level of flight experience required/flight-hours: Beginner(5 hour)
Nature of platform handling experience/skill required: Intermediate ~ Advance
Self leveling capability in thumbs-off stick situation: Yes (Stabilized mode)
Take-off & landing difficulty: Easy~Just ok
Take-off weight: <380g~400g
Hand launch: No....only if you're good at it but not recommended
Max tilt angle: 43 degree...over than that it'll flipped!
Bail-out/fail safe recovery altitude limit: -
FPV flight/radius: 500m ~ 800m max (given above FPV spec/setup)
FPV safe distance range for testing: 300~800m (Open field)
Flight time: 8~10 min
Ground spotter visibility (LOS): 150~200m
Safety issue
Flying brick, that's how i feel about it. Sturdy plastic frame, bunch of hardware cramp beside each other, solid sturdy build, fast spinning rotor rpm, fast and fast spinning blade sure will trim any grass without problem. Be aware tiny stuff have same slicing power as bigger ones since they have more RPM brushless motor power per-rotor. Not a best quad to be buzzing around the park full of people around. Another note that they do have high pitching buzz sounds from the rotor due to high RPM blade vibration at high decibel, i could hear 300m away from where i stand so its not good to annoy your neighborhood....its sounds like huge buzzing Hornet coming at you....so they are not stealth ninja unlike my previous FPV V929 (i still like my old ninja quad). Bigger quads like my DJI Phantom and APM 450 with rotor range 800~920KV low rpm with big blades are less noisier than a 250 size quad. Plus they are fast flying missile for a tiny frame...caution.
Pros and Cons
Here are list of pros and cons about this platform. Some of this are needed to take seriously if you are going deep into long term FPV ambition on FPV250 size racer
 Pros:
Pros:
- Small and portable.
- Cheaper to build and more compatible after market parts support due to high demand trending and popularity.
- The Nylon plastic material frame of DIATONE FPV 250 held very well when crashing on concrete and pavement, arm slightly bend but live another day to fly so i highly recommends this frame for beginner and intermediate pilot. My buddies who flew carbon fiber made 250mm frame smacked too bits and pieces after face plant on concrete..no hope to glue things back.
- Vendors/business owner make lots of profit selling 250 size multirotor parts because people crash a lot on these and customer will buy more to keep it flying.
Cons:
 They are super fast multirotor, impact per-square inch if accidentally hit an object will be blown to bits. They have high speed rotor, low drag, twitchy, high maneuverability, and tiny sturdy stuff is a rocket.
They are super fast multirotor, impact per-square inch if accidentally hit an object will be blown to bits. They have high speed rotor, low drag, twitchy, high maneuverability, and tiny sturdy stuff is a rocket.- Not a good long range FPV flying, need to shed some weight to get more lifting power.
- As said before the build is very compact, all vital electronics cramped together in a small space. This causes electronic interference among each hardware especially magnetic interference emitted from power distribution board/BEC (if placed close below flight controller board) which can cause flight controller sensors such as Magnitude/Compass sensor to go awry and incorrectly navigate in IOC mode or fail RTH (Return To Home) Not much space for electronic interference separation.
- No time to relax your thumb stick. Its all hands on and ready to rumble.
- Stock up lots of spare propellers even if you're an excellent pilot.
- Very bad L.O.S (Line Of Sight) flyer...too small to see your multirotor orientation, your hand all full on the controllers.
Current status & flight history
 Took me almost 3 weeks to get it to fly right due to PID setting on KK2.0 flight board. Also a transition to MultiWii Pro controller took me another 3 weeks too to get the right PID and GPS stuff to work. I had to call my buddy Mr. Voon to help me out and thanks to him save me 30% of overall effort to get the flight controller matched with 250mm platform. Building is routinely ok...but tuning is major pain in the ass to get it fly right on small frame. When its all done its smooth sailing after that. Flying is fun...its all about speed and the thrills going low and swooossssh! around trees, obstacles, field and other "Star Wars" pod racing like maneuvers. Handling are twitchy but its all on the pilot ability to thumb stick around and good eye to navigate through given path. Unlike my bigger multirotor a 250mm size will keep me full thumbs on the stick. 40% stabilization controlled by the flight controller and the remaining 60% is up for the pilot to keep it a float and stabilized all the way. My last build was running on MultiWii Pro flight controller has GPS capability that have position holding, auto return home and have some fancy UAV like capability stuff.....kinda too much for a small park racer you think?..but i did it for fun and out of curiosity.
Took me almost 3 weeks to get it to fly right due to PID setting on KK2.0 flight board. Also a transition to MultiWii Pro controller took me another 3 weeks too to get the right PID and GPS stuff to work. I had to call my buddy Mr. Voon to help me out and thanks to him save me 30% of overall effort to get the flight controller matched with 250mm platform. Building is routinely ok...but tuning is major pain in the ass to get it fly right on small frame. When its all done its smooth sailing after that. Flying is fun...its all about speed and the thrills going low and swooossssh! around trees, obstacles, field and other "Star Wars" pod racing like maneuvers. Handling are twitchy but its all on the pilot ability to thumb stick around and good eye to navigate through given path. Unlike my bigger multirotor a 250mm size will keep me full thumbs on the stick. 40% stabilization controlled by the flight controller and the remaining 60% is up for the pilot to keep it a float and stabilized all the way. My last build was running on MultiWii Pro flight controller has GPS capability that have position holding, auto return home and have some fancy UAV like capability stuff.....kinda too much for a small park racer you think?..but i did it for fun and out of curiosity.
Lifespan operation: 2 months
Maintenance priority check: Blade stress mark at the propeller root hub (Gemfan/Turnigy 3 blade 5x3)
Constant critical issue: Unpredictable hovering sensitivity due to unmatched PID setup...cause crash and broken propeller blade.
Maintenance cost per-lifespan: Need more spare propeller blade.
Flight hours accumulated per-lifespan: 52 hours
Best L.O.S distance record: 500~650m
Est. distance covered per-lifespan: 82km (Odo)
Best height record: 200m
Best flight time record per-session: 7~10min (2200mah 3s 40c)
Activity status: 250 hardware transferred into DIY FPV-600 foamy frame
 |
 |
 |
 |
Summary
 Flying fast close to ground proximity is awesome especially around obstacles, however flying solo without your wingman or someone to tailgate will get very boring unless you find someone in your local to join your POD racing activity around the parks full of trees and obstacles. FPV 250 is good for short range high speed thrills. Budget wise in the market you can own a "Plug n Fly" package for under $190 provided you already have basic equipment on piloting side such as radio and video gear. Do always remember to stock up more spare propellers regardless if you're excellent pilot or not because 250 platform can be very unpredictable at random time either because of dumb sticks or the trees jumping in front of you. But all i know PID setup on several flight controller is major or super pain in the ass the get it right because it took soo much time to do it rather than spent time having fun flying. I can see myself spending more money buying more props and fixes if i'm pushing my addiction further.. i don't see myself into racing yet because i'm more into aerial photography, scale plane cockpit flying and high flying stuff. Oh btw i still have bunch of FPV V929 that does the right job zooming around tight spaces with zero maintenance for years. Would i dig 250 racing again?... I'm done with it!
Flying fast close to ground proximity is awesome especially around obstacles, however flying solo without your wingman or someone to tailgate will get very boring unless you find someone in your local to join your POD racing activity around the parks full of trees and obstacles. FPV 250 is good for short range high speed thrills. Budget wise in the market you can own a "Plug n Fly" package for under $190 provided you already have basic equipment on piloting side such as radio and video gear. Do always remember to stock up more spare propellers regardless if you're excellent pilot or not because 250 platform can be very unpredictable at random time either because of dumb sticks or the trees jumping in front of you. But all i know PID setup on several flight controller is major or super pain in the ass the get it right because it took soo much time to do it rather than spent time having fun flying. I can see myself spending more money buying more props and fixes if i'm pushing my addiction further.. i don't see myself into racing yet because i'm more into aerial photography, scale plane cockpit flying and high flying stuff. Oh btw i still have bunch of FPV V929 that does the right job zooming around tight spaces with zero maintenance for years. Would i dig 250 racing again?... I'm done with it!

Videos/Medias![]() Here are some of my video and gallery related to the above topics:
Here are some of my video and gallery related to the above topics:
- Gallery: Diatone 250 FPV racer - 250mm
- My Youtube channel: 3DXL
- My videos:
- Flight video: Diatone FPV 250 racer - Field Run #2
- Flight video: Diatone FPV 250 racer - Field Run #1
- Flight video: Diatone FPV 250 racer - Test flight
Shopping list
So you wanted to build a 250 size racer? You're in luck because the market now flooded with this size of multirotor which are now available widely around the world both at your quality hobby stores and online. Some comes as "Plug n Fly" kit version while other offer combo kit for your best hand pick selection. Below are list what i found great to start your 250 size project.
 250mm quadcopter/multirotor frame and compatibles:
250mm quadcopter/multirotor frame and compatibles:
- Radio set/combo (If you wanted to upgrade radio range/distance):
- Brushless motor:
- ESC (Electronic Speed Controller):
- Propellers:
- Main FPV piloting camera:
- 960H CCD Effio 700TVL Camera Mini Video Camera
- Arkbird 1/3 Sony 960H CCD 700TVL FPV Camera For Aerial Photography
- DC12V 1/3 960H CCD 700TVL 2.8mm Lens Wide Angle Camera for FPV QAV250
- FPV 1/4 CMOS HD Color Camera Module 600TVL 120 Degree Wide Angle
- Aomway HD Mini 1/3'' CMOS 600TVL 2.8mm FPV Camera MOL5P *2.54 Port
- DAL 700TVL FPV HD 1/4'' CMOS Camera Module Wide Angle
- Eachine 700TVL 1/3 Cmos FPV 110 Degree Camera w/32CH Transmission
- Eachine 700TVL 1/3 Cmos FPV 148 Degree Camera w/32CH Transmission
- Main FPV piloting camera with integrated HD recording (video output capable):
- Basic flight controller:
- KK2.15 Mini Version Flight Controller Atmega644 PA For RC Multirotors

- KK2.1 Multirotor LCD Flight Controller With Atmega324 PA
- KK2.1.5 KK21EVO Flight Controller With Large LCD Second MPU
- OpenPilot CC3D Flight Controller Staight Pin STM32 32-bit Flexiport
- OpenPilot CC3D Flight Controller Bent Pin STM32 32-bit Flexiport
- KK2.15 Mini Version Flight Controller Atmega644 PA For RC Multirotors
- Advance Flight controller/AP System (for advance and autopilot build)
- MWC MultiWii SE V3.0 Flight Controller Board Standard Edition
- Crius MWC MultiWii SE V2.5 Standard Multi-Copter Flight Control Board
- CRIUS MWC MultiWii SE V2.5 Control Board W/GPS NAV Module Combo
- MultiWii PRO Flight Controller w/MTK GPS Module
- Eachine Mini APM V3.1 Flight Controller With NEO-6M GPS Module
- Mini APM V3.1 Flight Controller With Neo-6M GPS For Multicopters
- Mini APM2.72 Flight Controller with 6M GPS Telemetry OSD Power Board
- OSD module (On Screen Display):
- RCD 3060 OS Mini OSD FPV Module

- Skylark Tiny OSD III With 10Hz GPS And 60A Current Sensor
- Tarot TL300L OSD Module Image Overlay GPS System
- MinimOSD MAVLink OSD APM 2.6 APM 2.52 Flight Control Board
- Minim OSD On-Screen Display OSD Board APM Telemetry to APM 1 and APM 2
- CRIUS MAVLink-OSD Compatible With MinimOSD DC-DC Flight Control Board
- RCD 3060 OS Mini OSD FPV Module
- BEC:
- Video transmitter/combo:
- Skyzone TS5823 5.8G 200mW 32CH AV Transmitter Module
- Boscam TS586 FPV 5.8G 600mW 32CH AV Wireless Transmission Transmitter

- Boscam FT953 5.8G 400mw 32CH Mini FPV AV Transmitter
- Boscam FPV 32CH 5.8G 350mW Wireless Transmitter AV Transmission Black
- Boscam FPV 32CH 5.8G 600mW Wireless Transmitter And RC905 RX Receiver
- Boscam FPV 32CH 5.8G 350mW Wireless Transmitter And RC905 RX Receiver
- Video receiver/video goggle/LCD combo:
- Boscam FPV 5.8G 32CH Wireless AV Receiver RC832
- FPV 7inch TFT-LCD Monitor HD 800x480 Screen for RC Model
- Boscam Galaxy D4 FPV 5.8G 32CH LCD 8 Inch Monitor With DVR Receiver
- Boscam Galaxy D2 FPV 5.8G 32CH LCD 7 Inch Monitor For DJI WLtoys
- Skyzone SKY-700D FPV 5.8G 32CH Diversity 7 Inch TFT Monitor DVR
- SkyZone SKY-01 V2 FPV AIO Goggles 5.8G 32CH Head Tracing Glasses

- Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses Without DVR
- Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses with DVR
- Main battery:
- YKS BW140 11.1V 1300MAH 20C 3S T Plug Li-Po Battery
- Lion Power 11.1V 1200mAh 25C LiPo Battery BT682
- ZOP Power 11.1V 1000MAH 20C Lipo Battery JST Plug
- ZOP Power 11.1V 1500mAh 30C Lipo Battery XT60 Plug
- YKS BW136 11.1V 1000MAH 20C 3S JST Plug Li-Po Battery For RC Model
- YKS BW138 11.1V 1200MAH 20C 3S JST Plug Li-Po Battery For RC Model

Building threads/Referral/Support forum
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me hanging around some popular R/C and FPV forum below.
- Rcgroups.com FPV racing multirotor forum
- Rcgroups.com - General multirotor forum
- KK2 flight controller board forum and faq
- KK2 at Openpilot.org
- Flitetest.com KK2 build
- MultiWii flight controller wiki
- MultiWii website
- Rush-OSD/KVOSD development
- KVOSD firmware, setup and wiring
- Fpvlab.com - MWOSD - for MultiWii
- Racingfpv.com
- Tested.com - how to buid fpv racing quadcopter
