
 Quick vital tips for anyone who fly tail dragger planes like P-51D Mustang, Piper Cub, warbirds or any plane that nose up due to 2x tall front landing gear under the front wings and small steering landing gear below the tails (plane that have small steering wheel at the back like old plane does). If you've installed an AP system be sure you always properly startup/initiate the system as follows:
Quick vital tips for anyone who fly tail dragger planes like P-51D Mustang, Piper Cub, warbirds or any plane that nose up due to 2x tall front landing gear under the front wings and small steering landing gear below the tails (plane that have small steering wheel at the back like old plane does). If you've installed an AP system be sure you always properly startup/initiate the system as follows:
- Place your "tail dragger" plane flat with landing gear retracted like what any normal plane does at parking mode.
- Elevate the rear tail to horizontal leveling position in a same horizontal how the plane would when flying linearly/flat in the air. Place a towel, books or something to level the tail under the tail/steering wheel.
- Then you can turn on the radio and plug the battery on the plane. Leave the plane at current position untouched to allow the internal gyro AP or stabilization system to find its neutral point for 30 seconds or wait till the GPS lock on AP equipped plane else check as recommended in its on manual.
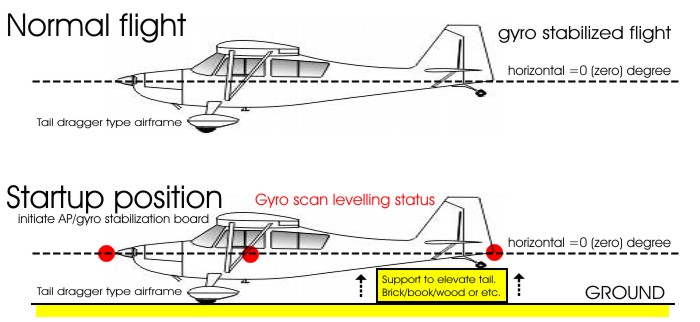
Many tail dragger FPV pilot failed to realized the important to do the above step to properly linear stabilized their plane so that the plane could detect the proper horizontal flight in the air else fail causes high AOA (Angle Of Attack = Nose up) flight.
If you doing it wrong you will notice the plane slightly nose up and roll too much during AP or gyro stabilization mode.
Many commercial marketed flight controller have the same basic procedure shown above regardless of brand and models because all of them are derived from 3x axis gyro internally to detect X,Y,Z axis during leveling startup. Sometimes the manual didn't stated the above procedure due to the fact majority of FPV/drone modeler uses flat belly glider or modern frontal steering landing gear.