

About
 3 years of flight with a combine total approximately over 1,312 flight hours (by late 2014) on the 4x unit of ARKBIRD Autopilot module prove the be most worthy flight controller ever flown in FPV world. Seriously speaking its hard to find a flight controller that could handle various type of wings and critical sizes with less brain needed to setup on first maiden flight. Coming from a person who flown on Open Sources flight controller such as APM (Ardupilot) i must say the Arkbird truly most convenient flight controller to use without dragging any marketing gimmick on board unlike other competitor in FPV/ drone market. I already posted truck load of FPV flight on fixed wing type of plane which are extremely challenging and impossible platform to fly as FPV drone flight. Flying long range on unthinkable airframe such as the beautiful scale 960mm size P-51D Mustang, 860mm size Aerobatics PITTS special and small 950mm Drifter Ultralight proof to be impossible for other FC module to handle due sensitive low wing nature and extremely small size too fly but on Arkbird nothing is impossible. Its truly a pure plug and fly system.
3 years of flight with a combine total approximately over 1,312 flight hours (by late 2014) on the 4x unit of ARKBIRD Autopilot module prove the be most worthy flight controller ever flown in FPV world. Seriously speaking its hard to find a flight controller that could handle various type of wings and critical sizes with less brain needed to setup on first maiden flight. Coming from a person who flown on Open Sources flight controller such as APM (Ardupilot) i must say the Arkbird truly most convenient flight controller to use without dragging any marketing gimmick on board unlike other competitor in FPV/ drone market. I already posted truck load of FPV flight on fixed wing type of plane which are extremely challenging and impossible platform to fly as FPV drone flight. Flying long range on unthinkable airframe such as the beautiful scale 960mm size P-51D Mustang, 860mm size Aerobatics PITTS special and small 950mm Drifter Ultralight proof to be impossible for other FC module to handle due sensitive low wing nature and extremely small size too fly but on Arkbird nothing is impossible. Its truly a pure plug and fly system.
 Just one month after manufacturer releases its product i had a hunch that this could be the best FC module for my plane because it very small and had straight forward FPV requirement without extra mumbo jumbo: stabilized and return fail safe feature. For any experience FPV pilot the biggest fear was losing radio and video transmission in the air after exceeded radio coverage range, this causing ground pilot lost contact with the plane has no direct signal to control. So basically many commercial flight controller hardware on board will activate RTH (Return To Home) once signal lost was trigger and the plane will make automatic "U" turn back to home base where it was last take off where ground pilot was standing. Once the radio and video signal in range the pilot will regain control back and resume normal flight else return home automatically. So this is most important and most basic requirement for RTH system on fixed wing today where Stabilization took second role and Cruize Mode third. RTH (Return To Home) uses GPS technology to guide the plane back and helps level parallel with terrains and some better models have barometers sensor to avoid terrain collision by flying parallel with the earth contour. At the time it was release it had to compete with well established rival in the market such as the STORM, Dragon Link, Feiyu Tech and APM.
Just one month after manufacturer releases its product i had a hunch that this could be the best FC module for my plane because it very small and had straight forward FPV requirement without extra mumbo jumbo: stabilized and return fail safe feature. For any experience FPV pilot the biggest fear was losing radio and video transmission in the air after exceeded radio coverage range, this causing ground pilot lost contact with the plane has no direct signal to control. So basically many commercial flight controller hardware on board will activate RTH (Return To Home) once signal lost was trigger and the plane will make automatic "U" turn back to home base where it was last take off where ground pilot was standing. Once the radio and video signal in range the pilot will regain control back and resume normal flight else return home automatically. So this is most important and most basic requirement for RTH system on fixed wing today where Stabilization took second role and Cruize Mode third. RTH (Return To Home) uses GPS technology to guide the plane back and helps level parallel with terrains and some better models have barometers sensor to avoid terrain collision by flying parallel with the earth contour. At the time it was release it had to compete with well established rival in the market such as the STORM, Dragon Link, Feiyu Tech and APM.

Specification
Flight controller size: 50 x 38 x 14mm
Weight of Arkbird (w/o cable and cover): 26.16g
Onboard sensor: Gyro, Barometer and Voltage sensor (Current sensor located as external module).
Weight of GPS module: 20.47g
GPS module type: GSTAR R-15E
Weight of Current sensor (w/o cable and cover): 12.6g
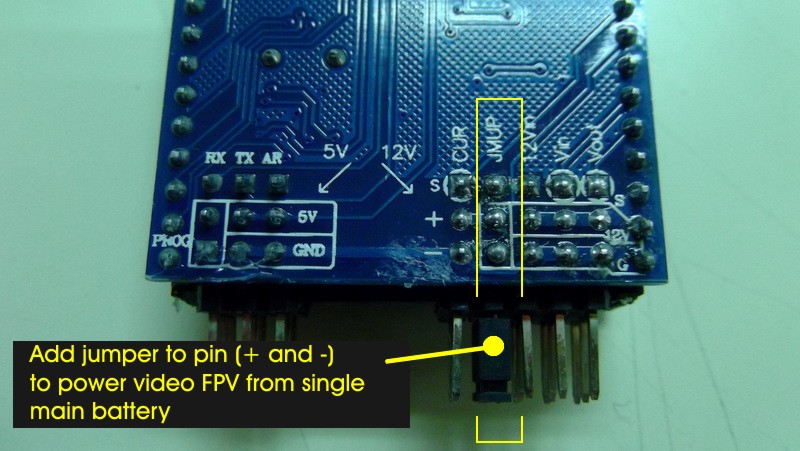
Voltage regulator: Internal 5v/12v supported to output pin.
Firmware version: 3.1
Flight mode supported: Gyro/rate, Cruise, Waypoint, Return To Home(RTH)/Failsafe.
Optional custom mode: Fence mode.
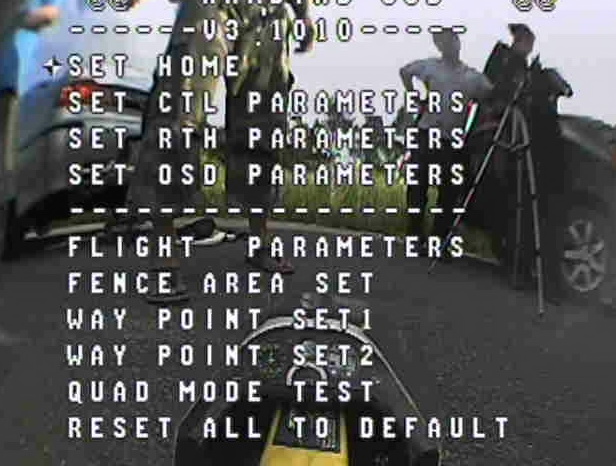
Setup GUI: Screen GUI menu via FPV LCD/video goggle.
Firmware upgrade capability: Yes (Required to buy programing/flash tools)
Product release year: Mid 2012
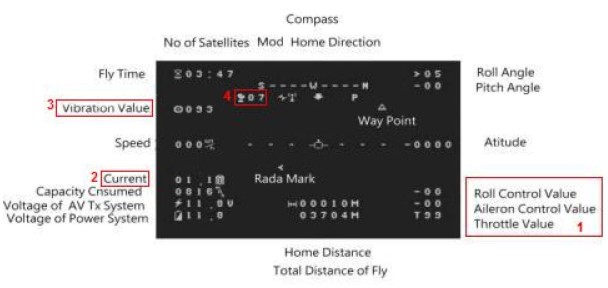
OSD features:
|
|
|

Package:
1. Arkbird autopilot unit
2. Current + voltage sensor with cable
3. GPS antenna set (first batch 2012 comes without black plastic case)
4. 30cm male-male servo extension cable
5. 15cm male-male 3pin extension cable.
![]() Dowload ARKBIRD Autopilot OSD system PDF manual here
Dowload ARKBIRD Autopilot OSD system PDF manual here
|
Pros:
|
Cons:
|
 |
 |
 |
 |
The plane have several type of flight mode which i'm going to mentioned below. Some of these modes does not elaborate more details in manual unless self research and testing made by your own.
- M
 anual model:
anual model:
Flying manually by hand, no stabilization or automated assist from flight controller given. So Arkbird have 0% controller over your flight.  Gyro/Rate mode stabilization:
Gyro/Rate mode stabilization:
Pilot still flying manually but with slightly 30% participation from Arkbird controller to give assistance to stabilize your plane from shaken by heavy wind in both rolls and yaw. For example if the plane was accidentally tilted by wind on its roll axis the flight controller helps to compensate the unattended offset back to original roll position (damping). Its like car suspension over rocks. It stabilized the plane to give you smooth flight. Cruise mode/ Head lock:
Cruise mode/ Head lock:
This mode allow you to fly straight leveled flight into "locked" position both heading direction and altitude hands free from the pilot controller. This is great feature allow user to relax and concentrate browsing or enjoying around the scenery via onboard 360 degree pan-tilt camera while the onboard flight controller do the flying. This mode activates various onboard component to achieve such flight such as Gyro, Barometer sensor, GPS and throttle parameter programming logic to maintain straight cruise flight. The Cruise Mode only works when the throttle stick is pushed exactly at pre-set throttle speed during early pre-program in GUI before flight. So if the failsafe speed at GUI was at 60% throttle then when switched into "Cruise Mode" you throttle stick must be at 60%=>* equal or more to stay afloat. Return To Home (RTH):
Return To Home (RTH):
This is commonly and most essential feature in every FPV flight requirement in the event of radio signal lost on both control on video transmission. It can be triggered manually by the pilot or automatically by the plane itself via 'radio receiver fail safe' trigger. What RTH do is simply make a"U" turn and fly back to home base/landing position where it was take off previously. The RTH flight will be fully automated all the way to the landing site. Upon reaching the home/landing site the plane will hover at default 100m and fly in figure "8" circuit loop until the pilot regain signal on both radio and video frequency to allow the pilot to land the plane manually. Unlike multi-rotor, plane FC module doesn't do auto landing yet at the time of this writing due to complexity nature of fixed wing flight. However if you're good in Arduino programming on Arduilot (APM/HKPilot) Open Source flight controller board it is possible but periodly at experimental stage.- Way Point mode:
When this mode is trigger on your 3 position switch on your radio controller the plane will automatically fly by itself without user/pilot intervention to the assigned Waypoint which you can pre-set inside the GUI menu. However it can be slightly tedious to setup the Waypoint because most of the setup parameters are based on compass direction and distance to achieve unlike common method where you can open you computer or tablet where you pin point the visually on google map to setup the waypoint. Not much people use this feature but its a good extra feature to have in Arkbird. Support up to 4 way point only.  Fence mode (non-switch):
Fence mode (non-switch):
Fence mode is non-switchable mode, its a pre-setup parameter inside the Arkbird via GUI where user can setup "Fence" parameter to avoid the plane stray away beyond the pre-set perimeter distance. By default fence is at 1 KM. User/pilot can enable and disable this feature, usually this feature useful for new pilot to avoid being stray too far from safe zone. If enabled once the plane crosses the perimeter the plane will ultimately turn back to base (RTH) until the pilot gain the control back.
Most of these modes are assigned default to 3 position switch located on right side top of your radio controller which is a standard feature for all 6ch and above type flight radio controller. By default you can activate around 4 types of modes during the flight of your choice. For my flight i have my 3 position switch to activate "Gyro/Rate mode stabilization" at Normal, "Cruise mode/ Head lock" at middle position (1) and Return To Home (RTH) at last bottom position (2). Before the 3 position switch can be use my right handed 2 position Gear switch on top of the controller shoulder when at "On" (1) position it will activate the 3 positions switch where it will start at "Gyro/Rate mode stabilization" by default. If Gear switch is "Off" (0) then its all back to manual flight.
Graphical installation/setup
Here some of the photo and graphical setup courtesy from various vendors, groups and manufacturer for you reference. Don't forget to click some Download for package of setup sheet and PDF manuals.


 |
 |
 |
 |
Vital setup tips
 I don't like to talk a lot how setup the Arkbird because there tonnes of manual, how to blog, PDF download, groups discussion and etc all over the internet, so do some Google search ok because sometime my setup are slightly different than conventional ones. Right now i only give some important tips that no one bother to share except myself. So if you have an Arkbird autopilot system, got your plane and already read the manual here is pre-setup you MUST do before you install and maiden your first flight with it. In sequential:
I don't like to talk a lot how setup the Arkbird because there tonnes of manual, how to blog, PDF download, groups discussion and etc all over the internet, so do some Google search ok because sometime my setup are slightly different than conventional ones. Right now i only give some important tips that no one bother to share except myself. So if you have an Arkbird autopilot system, got your plane and already read the manual here is pre-setup you MUST do before you install and maiden your first flight with it. In sequential:
- No reverse polarity protection:
Before you install Arkbird make sure to double check the voltage polarity terminal (+ and -) before you plug in 3s lipo into the module port else toasted module is irreversible. - Maiden you plane in stock L.O.S (Line Of Sight) to manually trim the flight surface:
This is a must thing to do on your plane before you install the Arkbird. Around 60% Arkbird owner made mistake by installing the flight controller module on fresh un-maiden plane which lead to unbalance flight and crashes. My flight buddies at field was few of the statistic. So what you do is if you have a new plane fly it manually line of sight like hobby model plane do, check the CG (center gravity), trim the aileron, elevator and rudder control, calibrate esc until it can fly stable linearly hands off from the radio controller. Any unbalance should be manual trim via mechanical lingkages/push rods on the surface control (elevator/rudder/aileron).All trims on radio controller should be discourage and leave it at neutral. After these basic procedure then you can install the Arkbird module. - Use external 5V/5A UBEC:
Don't always depends too much on 5V supply from main ESC because its always not enough and most of serious FPV causes ESC to shutdown due to overheat or on fire. Stock ESC can supply at 2A current ratin g once you plug in 3S lipo (11.1v) which is pretty common for any stock ESC on 800mm~1.2mm wingspan plane, yet the ESC isn't giving constant current and may lead to random "Brown out". Arkbird pcb board required stable uninterrupted current supply of 5V at minimum 3A while remaining "A" current rating to be distributed use to other module such as GPS, radio receiver, servo control and pan-tilt camera gimbal. The early sign and symptom of insufficient current is when you apply static throttle on your plane you will notice the OSD display HUD screen distorted or fade away/missing until the throttle is lower to zero. This mean the current into the boards if insufficient. So install external 5V/5A UBEC module and remove/cut-off the black and red wires from 3 wires servo. Just leave the signal wires (white/yellow/orange) from ESC plugged into the Arkbird throttle port (CH3 default).
g once you plug in 3S lipo (11.1v) which is pretty common for any stock ESC on 800mm~1.2mm wingspan plane, yet the ESC isn't giving constant current and may lead to random "Brown out". Arkbird pcb board required stable uninterrupted current supply of 5V at minimum 3A while remaining "A" current rating to be distributed use to other module such as GPS, radio receiver, servo control and pan-tilt camera gimbal. The early sign and symptom of insufficient current is when you apply static throttle on your plane you will notice the OSD display HUD screen distorted or fade away/missing until the throttle is lower to zero. This mean the current into the boards if insufficient. So install external 5V/5A UBEC module and remove/cut-off the black and red wires from 3 wires servo. Just leave the signal wires (white/yellow/orange) from ESC plugged into the Arkbird throttle port (CH3 default). - Startup levelled:
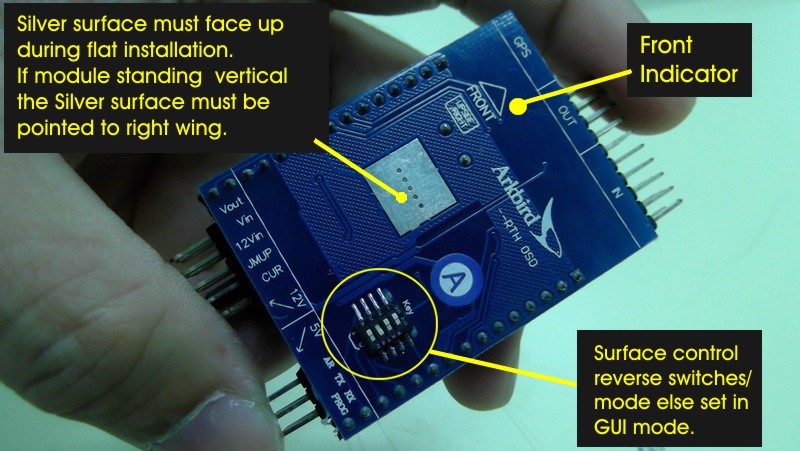
Before you plug in the battery on your plane keep the plane leveled just like how you want it to be leveled in the air because the internal IMU/gyro trying to calibrate and sense the horizontal position. I've already made tutorial on these so read some of the guides here: Levelling tutorial. - Reset Home position:
If you flying at multiple places in short period of time lets say between 30 min ~ 1 hour you keep moving your home base and take off from different places for example you was in football field point A few hours ago and now you move to location at beach point B, don't forget to manually reset the home position via GUI menu. Else if you trigger RTH it will fly back to your last location at point A instead your current new take-off location at point B because you forgot to flush out the memory of the old fixed location at point A (football field).
Reliability and dependability
 Flying on Arkbird for 3 years almost on daily basis, you can imagine how much stress and pounding this flight controller have gone through in the rough seasonal skies. Do take note as published inside the website
Flying on Arkbird for 3 years almost on daily basis, you can imagine how much stress and pounding this flight controller have gone through in the rough seasonal skies. Do take note as published inside the website i have bunch of ARKBID modules installed on 4x planes: 1x P-51D Mustang, 1x Pitts Special and 2x ES Drifter Ultralight all of them flown at exceed the airframe lifespan and still active today, do watch their respective video on Youtube.. I also have others undocumented plane flown on Arkbird on previous build which is on DURAFLY BF-110 twin and FMS P-51D 1.4m too. All of them flown with zero "0" problem.. zeeeerrrrrrroooo! that is because i did my homework and tune my plane properly before Arkbird installation. Thousands of miles, thousands of flight hours, wind, rain, hot weather and thunder storm damn all passed the test with flying colors. People around the world flying their gliders while i'm flying my exotics airframe.....very mind boggling to fly on small airframe i kid you not yet Arkbird handles them all very well.
i have bunch of ARKBID modules installed on 4x planes: 1x P-51D Mustang, 1x Pitts Special and 2x ES Drifter Ultralight all of them flown at exceed the airframe lifespan and still active today, do watch their respective video on Youtube.. I also have others undocumented plane flown on Arkbird on previous build which is on DURAFLY BF-110 twin and FMS P-51D 1.4m too. All of them flown with zero "0" problem.. zeeeerrrrrrroooo! that is because i did my homework and tune my plane properly before Arkbird installation. Thousands of miles, thousands of flight hours, wind, rain, hot weather and thunder storm damn all passed the test with flying colors. People around the world flying their gliders while i'm flying my exotics airframe.....very mind boggling to fly on small airframe i kid you not yet Arkbird handles them all very well.
Here a list of incident where i proudly say its a highly dependable flight controller:
- Rain and wet cloudy flight:
 My plane flew more often in humid environment especially early in the morning, sometimes in the rain due to tropical island weather. Most of my flight controller located in open fuselage where it constantly had some rain washout (ES Drifter Ultralight fuselage) while other models soaked trapped inside enclosed fuselage (P-51D Mustang and Pitts Special). So far under wet sloshy condition it runs well without a hitch and landed safely.
My plane flew more often in humid environment especially early in the morning, sometimes in the rain due to tropical island weather. Most of my flight controller located in open fuselage where it constantly had some rain washout (ES Drifter Ultralight fuselage) while other models soaked trapped inside enclosed fuselage (P-51D Mustang and Pitts Special). So far under wet sloshy condition it runs well without a hitch and landed safely. - Smart throttle control:
One of the first key feature that caught my attention of buy this unit was the auto throttle management. During Cruise control mode and RTH/failsafe autopilot mode the module will keep the plane floating according to "logic thinking" when and how much throttle should be needed to push the plane forward without stalling or draining the power. This is useful to avoid the plane from getting stuck hovering at the same point or slowing down to the point of no return.
For example given pre-set fail safe parameter i set in GUI (in ES Drifter Ultralight platform) is 60% throttle, 45km speed and 100m safe altitude if any of the below following condition occur it will compensate the throttle to keep the flight stable without losing the plane:- Should the head wind occur hitting at 25km/h (-25km/h loss speed) the AP system will auto compensate the speed by increasing the throttle to keep it at constant at 45km/h as detected by GPS low speed changes.
- Should it stall below 100m it will auto full throttle beyond given parameter throttle/speed parameter to bail out falling from unintended altitude.

- GPS lock reliability:
Most of my GPS (GSTAR R-15E) module located hidden away from external view to keep my plane look clean and scale. If you look hard on all my recent FPV plane you don't see any GPS dangling outside and make it all look ugly. Usually i hide under the dome just 10mm close to aileron servo installation (ES Drifter Ultralight), inside the cockpit 5mm close to camera main 808 #16 board module (P-51D Mustang) and under metal and bolts of wings center struts inside the fuselage 1cm away from UBEC (Pitts Special).
With the above condition results:
1. ES Drifter Ultralight:
Average 2 minutes lock on 8~9 satellite, 13 satellite full lock with 1 random drop/loss throughout 45 minutes of flight per-round.
2. P-51D Mustang:
Average 3~4 minutes lock on 8~9 satellite, 12 satellite full lock with 1 random drop/loss throughout 45 minutes of flight per-round.
3. Pitts Special:
Average 4~7 minutes lock on 8~9 satellite, 12 satellite full lock with 1 random drop/loss throughout 40 minutes of flight per-round. Slow lock because GPS module located below solid winged object but still works great throughout the flight.
In comparison with APM's UBLOX LEA-6H GPS module on my Q450 above the frame: Average 4~5 minutes lock on 8~9 satellite, 13 satellite full lock with 3~7 random drop/loss throughout 15 minutes of flight per-round. - Small plane and low wing handling:
 So you already watch all those my flight videos yet? No? You should, watch some at my Youtube channel (3DXL). I have nothing to say..its too perfect to be true for something that could fly a small scale plane outside traditional FPV platform; the glider. The internal stabilization was perfect, the autopilot handles extremely well on stormy and windy condition. Usually small plane with with span between 860mm~960mm at weight below 700gram hardly able to survive long and harsh FPV flight with inconsistent weather but Arkbird manage to pull it clean. As you all probably seen it before i like to put camera high for "Selfie" HD recording above the wings and it still balance the plane well. Awesomeness level 999999+.
So you already watch all those my flight videos yet? No? You should, watch some at my Youtube channel (3DXL). I have nothing to say..its too perfect to be true for something that could fly a small scale plane outside traditional FPV platform; the glider. The internal stabilization was perfect, the autopilot handles extremely well on stormy and windy condition. Usually small plane with with span between 860mm~960mm at weight below 700gram hardly able to survive long and harsh FPV flight with inconsistent weather but Arkbird manage to pull it clean. As you all probably seen it before i like to put camera high for "Selfie" HD recording above the wings and it still balance the plane well. Awesomeness level 999999+. - Sea water crash and survivability
One of my ES Drifter Ultralight did crash into sea water when i was about to do landing close to the beach pier but due to pilot error misjudge the landing est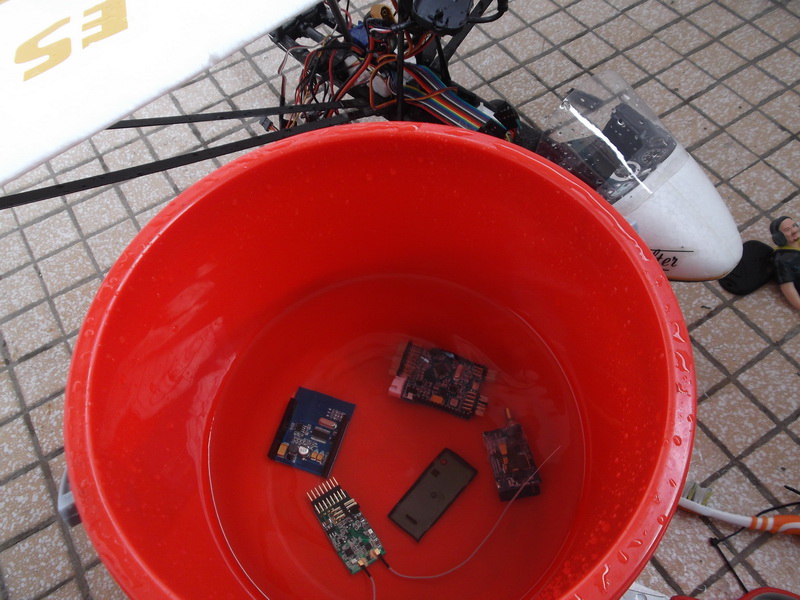 imation and coastal wind turbulance the plane took a deep dunk into the edge of the beach fully submerged into salty sea water. Recued after 2 minutes.
imation and coastal wind turbulance the plane took a deep dunk into the edge of the beach fully submerged into salty sea water. Recued after 2 minutes.
At home after fully dismantled, water tap brushing, soaked for 1 hour and dried for 5 days. The whole plane was fully operational without any necessary replacement. The Arkbird module survive with all the setting parameter intact, however the Barometer sensor failed to work fortunately ARKBID have a special feature where you can switch to GPS altitude sensor instead of Barometer which is good alternative.
List of rival components
Here are lists of rival competitor component that run similar feature as Arkbird for comparison within their price range group (USD$120~170):
- Feiyu Tech FY 41AP Lite Entry Level FPV Autopilot
- Cyclops Storm With Autopilot System OSD
- APM Flight Controller Set APM 2.6 & 6M GPS & OSD & Radio Telemetry (Open Source)
Videos/Medias
Here are sample of on all my planes that uses ARKBIRD Autopilot system posted on my Youtube channel:
Reputable vendor/seller
Here are list of reputable vendor/seller which i bought from and also verified by community forum discussion groups. Also i've experienced buying from these places that have good support and services:
1. Seller Hobby King: Hobby King.com ARKBIRD OSD Autopilot
2. Seller FoxtechFPV: Foxtechfpv.com ARKBIRD OSD Autopilot
3. Seller Infinity-hobby: Infinity-hobby.com ARKBIRD OSD Autopilot
 Support group:
Support group:
Places where you can find help and resources related to this product:
Topic: Rcgroups - Arkbird OSD Autopilot
Topic: Anyone tried the "Arkbird" OSD Autopilot?
My project:
LList of my project that uses Arkbird Autopilot module:
1. FPV platform: P-51D Mustang - 960mm
2. FPV platform: Pitts Special - 860mm
3. FPV platform: ES Drifter Ultralight - 950mm
Troubleshooting and FAQ
My advice "if it doesn't broken don't fix it". Seriously don't try to dismantle this video goggle to quench your curiosity because everything that stuff inside the shell is ultra cramp and compacted!. Not all electronics parts such properly seated on its place holder, bunch of dangling flimsy wire pinch each other in tight space and lots of cold soldering point too. Well below are few cautionary advices, warning, trouble shootings and FAQ hints you should know when talking care of these goggle.
- OSD layout fading away/flicker during throttle but the background video intact?:
Causes: This is insufficient 5V current (A) into the Arkbird into the pcb circuit. Culprit usually because you feed it from ESC internal BEC (2A) which doesn't give constant solid current to all the onboard electronic.
Solution: Integrated BEC from ESC should be avoided and must use independent external 5V/5A UBEC to power up your Arkbird and also applicable to other onboard component to such as RX module, 5V camera and servo. 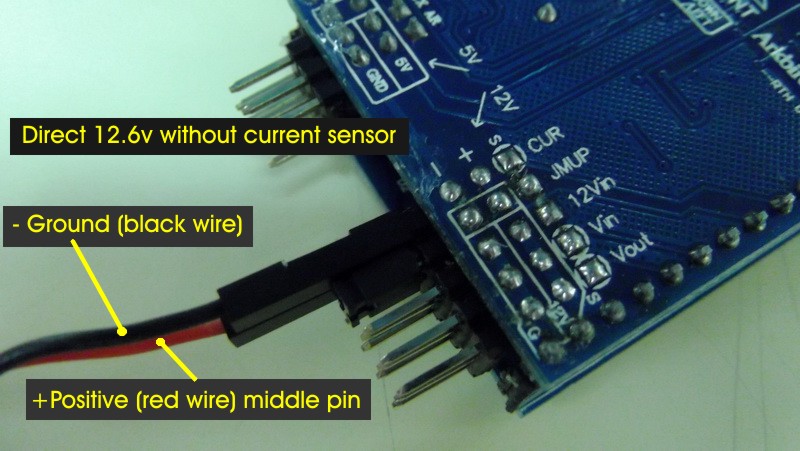 Can i use the Arkbird OSD Autopilot without Current/Voltage sensor module? :
Can i use the Arkbird OSD Autopilot without Current/Voltage sensor module? :
Answer: Yes you can run Arkbird without current/voltage sensor. At the default port where you previously plugin the voltage/current sensor port you will notice from the plug there are 3 wires going into it: White for sensor signal, Black (-) is grounding and Red (+) is 7~12.6v on the sensor module. Remove the sensor and you can direct plugin just two main power wire Black (-) and Red (+) to the corresponding polarity shown on board. With this method you only loose current sensing ability which is optional for most FPV pilots. Your voltage sensing between (7~12.6v) still working and intact because the onboard have voltage regulator. Removing voltage/current sensor module will improve weight reduction since the module itself is heavy compare to average electronic component on the plane.- How do i calibrate ESC or enter ESC programming mode via Arkbird? (For mode 2 user):
Answer: Turn on your radio transmitter (mode 2), push your throttle up (100%) max. Flick all then switch to RTH mode. Then turn on your plane...as usual the onboard Arkbird booting trying to scan the satellite with its elevator up. Immediately skip it/by pass satellite scan by pushing your aileron stick on your radio transmitter 100% push to the right and hold it for 5~10 second until you hear the plane elevator lowered straight and the ESC first beeping. Immediately release the aileron stick and listen the first ESC beep after you skip the satellite scan procedure. Once you hear the first ESC "beep" lower down the throttle, second ESC beep will acknowledge the throttle range calibration. (If you keep the throttle up for second beep the ESC will initiate programming mode with musical tone then you need to refer to your ESC manual instruction from here on). Now unplug the plane battery and switch off your transmitter, return all switched to normal position and start the plane normally to proceed normal Arkbird startup procedure uninterrupted before flying.
Summary
 The ARKBIRD Autopilot system is the best AP system for me because it is the most straight forward usage, simple to setup and less complicated to use and sometimes i even forget it was there all along. Price wise was on the spot very affordable consider the fact its cheaper to assemble and save you medical bill on your headache setting up y
The ARKBIRD Autopilot system is the best AP system for me because it is the most straight forward usage, simple to setup and less complicated to use and sometimes i even forget it was there all along. Price wise was on the spot very affordable consider the fact its cheaper to assemble and save you medical bill on your headache setting up y our first FPV plane. At the time of writing this review the ARKBIRD still win the best RTH/AP hardware in term of size factor and simplicity in circuit design and its feature never fail to get my plane back save in every complicated situation. To this day the manufacturer releases several firmware improvement upgrade via upgrade tool to Arkbird module, however i haven't done any upgrade and still remain stock on version 3.1 which i believe if "it ain't broke don't fix it"...it works fine so i leave it as it is. So i must say i had my money worth spending on these life saver and its the best insurance to safe guard your plane from lost in the sky.
our first FPV plane. At the time of writing this review the ARKBIRD still win the best RTH/AP hardware in term of size factor and simplicity in circuit design and its feature never fail to get my plane back save in every complicated situation. To this day the manufacturer releases several firmware improvement upgrade via upgrade tool to Arkbird module, however i haven't done any upgrade and still remain stock on version 3.1 which i believe if "it ain't broke don't fix it"...it works fine so i leave it as it is. So i must say i had my money worth spending on these life saver and its the best insurance to safe guard your plane from lost in the sky.